Anemone uses a process algebra called Multi-Bach language which incorporates the following features.
Multi-Bach allows the user to define finite sets. Concretely, such sets are defined by associating an identifier with an enumeration of elements, such as:
1 2 | eset Cols = { 1, 2, 3, 4, 5, 6 }.
Rows = { 1, 2, 3, 4, 5, 6 }.
|
Sets are defined by the keyword eset followed by a list of set declarations of the form
set_identifier = set_enumeration.
where set_identifer is a string of letters and digits, starting with an upper case letter, and where set_enumeration is a comma-separated list of strings composed of letters and digits, surrounded by the { and } brackets.
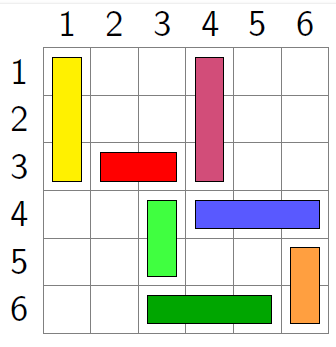
Example: In the case of the Rush Hour Problem, two sets are required: one to specify the columns and the rows (ranging from 1 to 6) and one to specify the colors of the vehicles.
1 2 | eset RCInt = { 1, 2, 3, 4, 5, 6 }.
Colors = { yellow , green , blue , purple , red , orange}.
|
Si-terms are either tokens, expressed as strings of letters and digits (possibly containing only letters or digits) or structured constructs of the form \(f(t_{1}, ..., t_{n})\) where \(f, t_{1}, ...,t_{n}\) are such strings.
Example: In the Rush Hour example, free places of the game are represented by the si-terms free(i,j) with i a row and j a column. Such si-terms indicate the places currently free on the grid, namely not occupied by a car or a truck.
Map rewritings are declared by using the eqn keyword together with equations of the form s = t. where s and t are si-terms.
Example: In the Rush Hour example, assuming that trucks take three cells and are identified by the upper and left-most cell they occupy, the operation down_truck determines the cell to be taken by a truck moving down:
1 2 | map down_truck : RCInt −> RCInt.
eqn down_truck ( 1 ) = 4 . down_truck ( 2 ) = 5 . down_truck (3) = 6.
|
See also
Besides down_truck, our modelling of the Rush Hour problem requires to specify a similar mapping down_car for cars (taking two cells instead of three). It is also convient to specify two additional mappings right_truck and right_car corresponding to horizontal movements. Finally, pred and succ mappings are defined to reflect the predecessor and successor functions.
The primitives of Multi-Bach comprise the tell, ask, nask and get primitives. They can be composed to form more complex agents by using traditional composition operators from concurrency theory:
Multi-Bach adds two other mechanisms:
The statements of the Multi-Bach language, called agents by abuse of language, consist of the statements A generated by the following grammar:
where Prim represents a primitive, Proc a procedure call, C a condition, e a variable and S a set.
Example: The behavior of a vertical truck can be described as follows:
proc VerticalTruck ( r: RCInt, c: RCInt, p: Colors ) =
( ( r>1 & r<5) −>
( get ( free ( pred ( r ) , c ) ) ;
MoveTruck (p , pred ( r ) , c ) ;
tell ( free ( succ ( succ ( r ) ) , c ) ) ;
VerticalTruck ( pred ( r ) , c , p) ) ).
+
( ( r>=1 & r<4) −>
( get ( free ( down_truck ( r ) , c ) ) ;
MoveTruck (p , succ ( r ) , c ) ;
tell ( free ( r , c ) ) ;
VerticalTruck ( succ ( r ) , c, p ) ) ).
The code of some trucks and cars:
proc YellowTruck = VerticalTruck (1 ,1 , yellow ).
GreenTruck = HorizontalTruck (6 ,3 , green ).
RedCar = HorizontalCar (3 ,2 , red ).
OrangeCar = VerticalCar (5 ,6 , orange ).
The code of places occupied by vertical trucks:
proc VTruckPlaces( r: RCInt , c: RCInt) =
(r<5) −> get ( free( r , c ) );
get ( free( succ ( r ) , c ) );
get ( free( succ ( succ ( r ) ) , c ) ).
The code of places occupied by some trucks and cars:
proc YellowTruck = VTruckPlaces ( 1 , 1 ).
GreenTruck = HTruckPlaces ( 6 , 3 ).
RedCar = HCarPlaces ( 3 , 2 ).
OrangeCar = VCarPlaces ( 5 , 6 ).
Multi-Bach treats processes as active data through the four primtives, tellp(Proc), askp(Proc), naskp(Proc) and getp(Proc). They are used to respectively create a thread in charge of computing the procedure call Proc, to test for its presence or absence and to remove a thread associated with Proc. For instance, tellp(YellowTruck) creates a new thread for the yellow truck, identified by the string ’YellowTruck’. Executing getp(YellowTruck) kills this thread, whatever point of execution the thread has reached.
Rush Hour problem: Animation
Multi-Bach uses rules of the form \(+t, −u −> +v, −w\) to assert that the presence of \(t\) and the absence of \(u\) implies the presence of \(v\) and the absence of \(w\).
A rule is declared by using the keyword rule together with an equation of the form
rule_name = rule_description.
Example: The following rule asserts that any time a si-term moveCar(p,r,c) appears on the store, for some color \(p\), some row number \(r\) and some column number \(c\), the procedure call MoveCar(p,r,c) should be triggered and the si-term moveCar(p,r,c)should be removed:
1 | rule end_puzzle = +out −−> +puzzle_solved, +RedCarOut.
|
with procedure RedCarOut defined as:
1 | proc RedCarOut = att ( position , red_car , rhScene , out_grid ).
|
Animations are obtained in a twofold manner:
A scene is declared by using the scene keyword together with an equation of the form
scene_name = scene_description.
Example: The following listing provides an example of the definition of the scene named rhScene:
scene rhScene =
{
size = (640 ,640).
layers = {top , middle , bottom}.
background = loadImage ( Images/ the_background_img.png ).
green_car = loadImage ( Images/ green_car.jpg ).
red_car = loadImage ( Images/ red_car.jpg ).
widget car =
{
attributes = { color in idColors. }
display = { color = green −> green_car.
color = red −> red_car .}
init = { wdX = 40.
wdY = 60.
wdL = top.
color = red.
}
}
}
Scenes and widgets are manipulated by means of two primitives:
- draw_scene(s): to draw the scene identified by s
- att(x,w,s,v): to give value v to the attribute x of the widget identified by w on scene s.
where
Code: placing trucks
proc PlaceTruck ( r: RCInt, c: RCInt, p: Colors ) =
( p = yellow −> place_at ( yellow_truck , rhScene ,x_vehicle ( c ) , y_vehicle ( r ) ) )
+
( p = green −> place_at ( green_truck , rhScene , x_vehicle ( c ) , y_vehicle ( r ) ) )
+
( p = bleu −> place_at ( bleu_truck , rhScene , x_vehicle ( c ) , y_vehicle ( r ) ) )
+
( p = purple −> place_at ( purple_truck , rhScene ,x_vehicle ( c ) , y_vehicle ( r ) ) ).
proc MoveTruck ( r: RCInt, c: RCInt, p: Colors ) =
( p = yellow −> move_to ( yellow_truck , rhScene ,x_vehicle ( c ) , y_vehicle ( r ) ) )
+
( p = green −> move_to ( green_truck , rhScene ,x_vehicle ( c ) , y_vehicle ( r ) ) )
+
( p = bleu −> move_to ( bleu_truck , rhScene ,x_vehicle ( c ) , y_vehicle ( r ) ) )
+
( p = purple −> move_to ( purple_truck , rhScene ,x_vehicle ( c ) , y_vehicle ( r ) ) ).
The Anemone workbench uses a fragment of PLTL with, as main goal, to check the reachability of states. It defined by the following grammar:
TF ::= PF | Next TF | PF Until TF % Where PF is a propositional formula.
Example : If the red car indicates that it leaves the grid by placing out on the store, a solution to the rush problem is obtained by verifying the formula:
true Until(#out= 1)
Such formulae being very often used, they are abbreviated in Anemone as:
Reach(#out= 1)